Multirate Filtering for Digital Signal Processing: MATLAB® Applications, Chapter XI: Filters in Multirate Systems - Exercises
Contents
Exercise 11.1
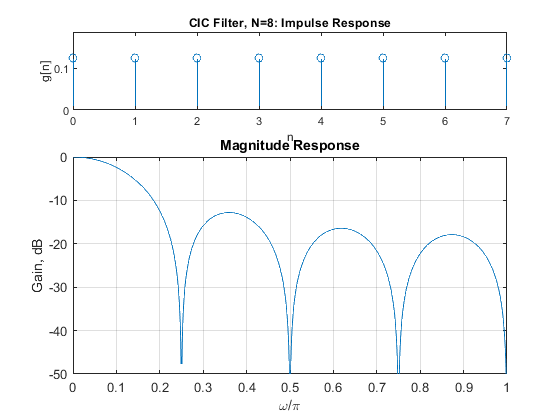
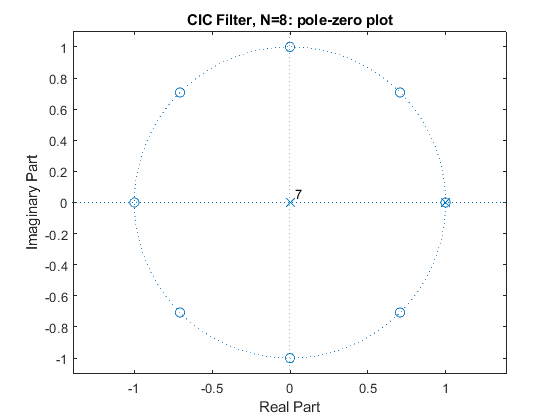
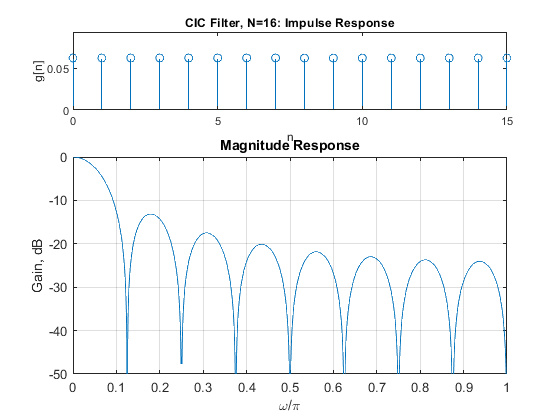
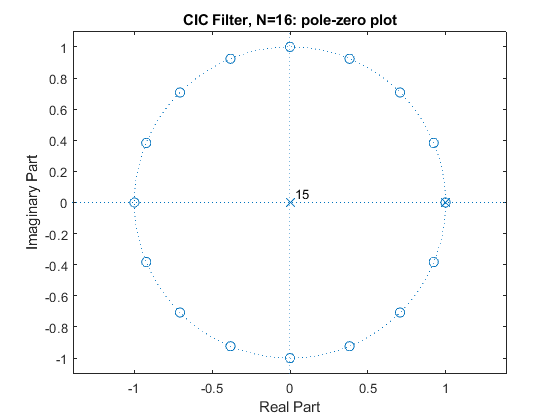
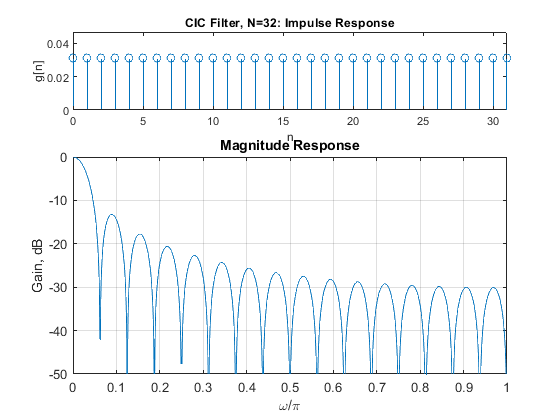
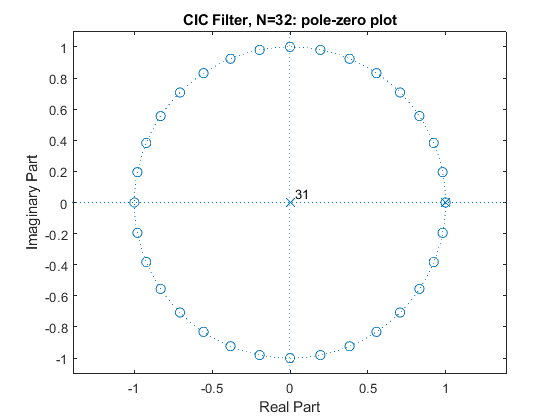
Compute and plot the impulse response, magnitude response, and the pole-zero plot of the single-stage CIC filters G(z) for N = 8, 16, and 32.
N=8; g=rectwin(N)/N; % CIC filter impulse response % Recursive representation of the CIC filter % G(Z)=(1/N)*(1-z^(-N))/(1-z^-1)=(1/N)*B(z)/A(z) B = [1,zeros(1,N-1),-1]; A = [1,-1]; [G,f]=freqz(B/N,A,1000,2); figure(1), subplot(3,1,1), stem(0:N-1,g), axis([0,N-1,0,(1+0.5)/N]), xlabel('n'),ylabel('g[n]'), title('CIC Filter, N=8: Impulse Response'); subplot(3,1,2:3), plot(f,20*log10(abs(G))), xlabel('\omega/\pi'),ylabel('Gain, dB'), title('Magnitude Response'); axis([0,1,-50,0]), grid, figure(2), zplane(B,A), title('CIC Filter, N=8: pole-zero plot'); N=16; g=rectwin(N)/N; % CIC filter impulse response % Recursive representation of the CIC filter % G(Z)=(1/N)*(1-z^(-N))/(1-z^-1)=(1/N)*B(z)/A(z) B = [1,zeros(1,N-1),-1]; A = [1,-1]; [G,f]=freqz(B/N,A,1000,2); figure(3), subplot(3,1,1), stem(0:N-1,g), axis([0,N-1,0,(1+0.5)/N]), xlabel('n'),ylabel('g[n]'), title('CIC Filter, N=16: Impulse Response'); subplot(3,1,2:3), plot(f,20*log10(abs(G))), xlabel('\omega/\pi'),ylabel('Gain, dB'), title('Magnitude Response'); axis([0,1,-50,0]), grid, figure(4), zplane(B,A), title('CIC Filter, N=16: pole-zero plot'); N=32; g=rectwin(N)/N; % CIC filter impulse response % Recursive representation of the CIC filter % G(Z)=(1/N)*(1-z^(-N))/(1-z^-1)=(1/N)*B(z)/A(z) B = [1,zeros(1,N-1),-1]; A = [1,-1]; [G,f]=freqz(B/N,A,1000,2); figure(5), subplot(3,1,1), stem(0:N-1,g), axis([0,N-1,0,(1+0.5)/N]), xlabel('n'),ylabel('g[n]'), title('CIC Filter, N=32: Impulse Response'); subplot(3,1,2:3), plot(f,20*log10(abs(G))), xlabel('\omega/\pi'),ylabel('Gain, dB'), title('Magnitude Response'); axis([0,1,-50,0]), grid, figure(6), zplane(B,A), title('CIC Filter, N=32: pole-zero plot');
Exercise 11.2
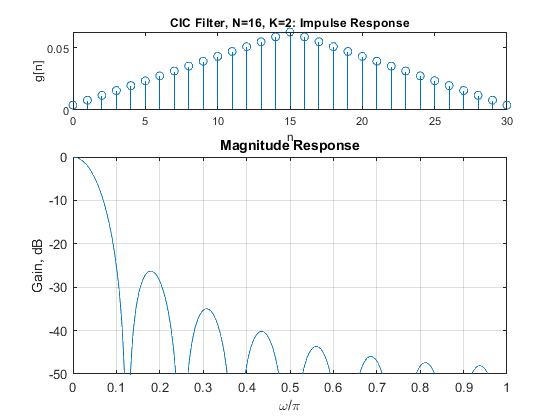
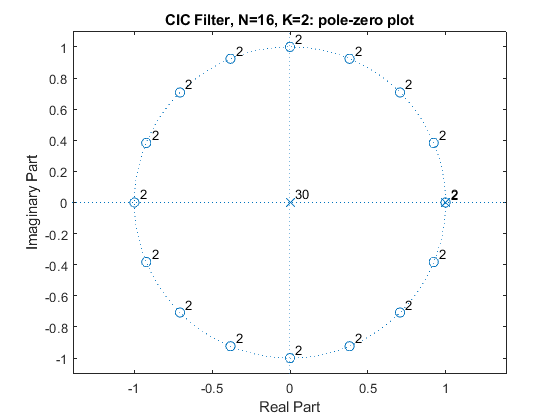
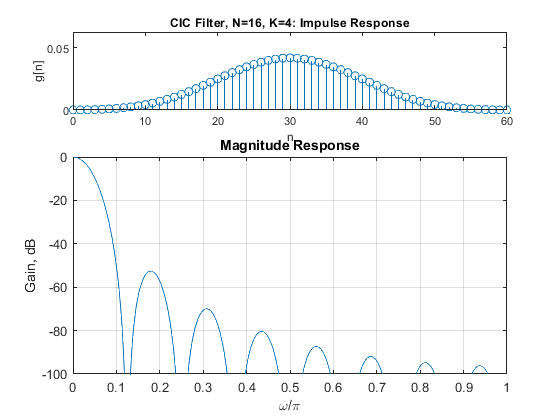
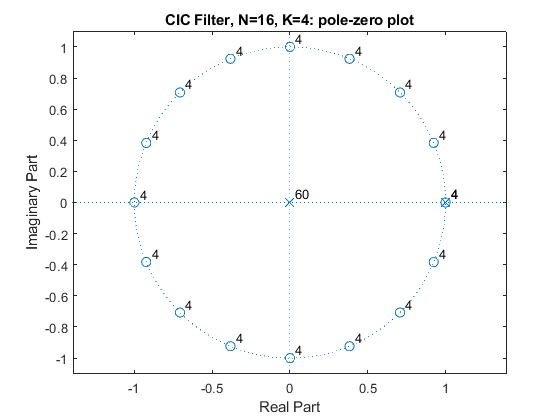
Compute and plot the impulse response, magnitude response, and the pole-zero plot of the K-stage CIC filters GK(z) for N = 16 and K = 2 and K = 4.
close all, clear all N=16; K = 2; g2=conv(rectwin(N)/N,rectwin(N)/N); % Generating the 2-stage CIC filter impulse response % Recursive representation of the CIC filter % G(Z)=(1/N)*(1-z^(-N))/(1-z^-1)=(1/N)*B(z)/A(z) B = [1,zeros(1,N-1),-1]; B2 = conv(B,B); A = [1,-1]; A2 = conv(A,A); [G2,f]=freqz(B2/(N^K),A2,1000,2); figure(1), subplot(3,1,1), stem(0:(2*N-2),g2), axis([0,2*N-2,0,1/N]), xlabel('n'),ylabel('g[n]'), title('CIC Filter, N=16, K=2: Impulse Response'); subplot(3,1,2:3), plot(f,20*log10(abs(G2))), xlabel('\omega/\pi'),ylabel('Gain, dB'), title('Magnitude Response'); axis([0,1,-50,0]), grid, figure(2), zplane(B2,A2), title('CIC Filter, N=16, K=2: pole-zero plot'); N=16; K = 4; g4=conv(g2,g2); % Generating the 4-stage CIC filter impulse response B4 = conv(B2,B2); A4 = conv(A2,A2); [G4,f]=freqz(B4/(N^K),A4,1000,2); figure(3), subplot(3,1,1), stem(0:length(g4)-1,g4), axis([0,length(g4)-1,0,1/N]), xlabel('n'),ylabel('g[n]'), title('CIC Filter, N=16, K=4: Impulse Response'); subplot(3,1,2:3), plot(f,20*log10(abs(G4))), xlabel('\omega/\pi'),ylabel('Gain, dB'), title('Magnitude Response'); axis([0,1,-100,0]), grid, figure(4), zplane(B4,A4), title('CIC Filter, N=16, K=4: pole-zero plot');
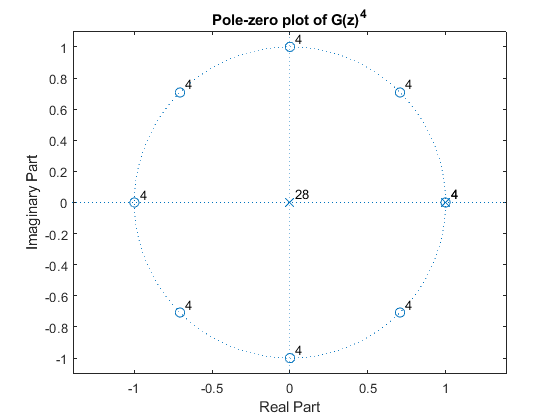
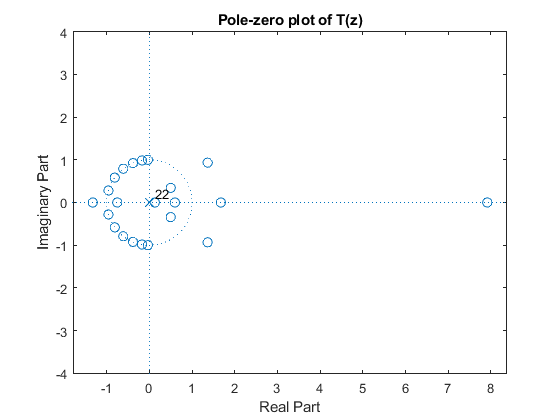
Exercise 11.3
Modify specifications of Example 11.1 to design a two-stage factor-of-16
decimator consisting of the CIC-based factor-of-8 decimator in the first stage,
and the factor-of-two decimator in the second stage.
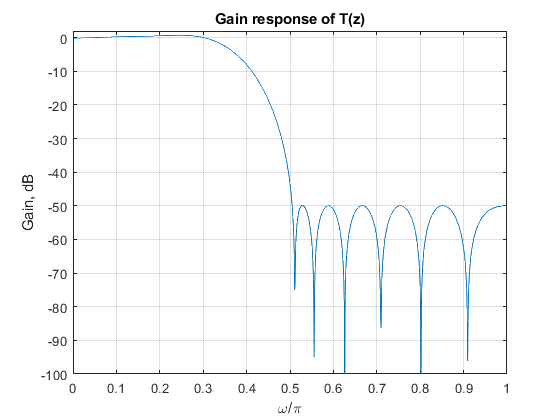
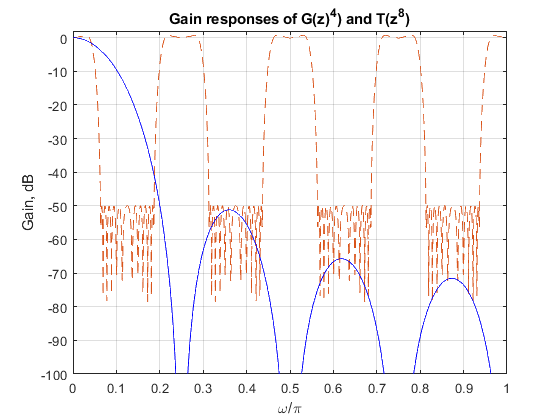
Design CIC filter
GK(z) and FIR filter T(z).
Display the magnitude responses and the pole-zero plots of GK(z)
and T(z).
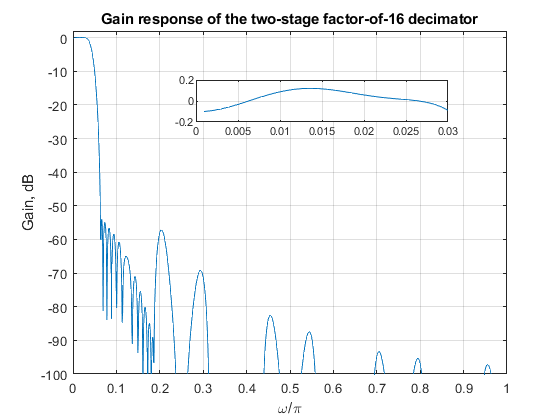
Display the magnitude response of the single-stage equivalent of the
resulting overall decimator.
clear all, close all % % DESIGN SPECIFICATIONS: % The overall decimation factor M = 16. % The overall decimation filter H(z) is specified by: % Passband edge frequency omega_p = 0.03pi, % Deviations of the passband magnitude response are bounded to ap = +(-)0.15 dB. % Stopband edge frequency omega_s = pi/M = 0.0625pi % Requested minimal stopband attenuation as = 50 dB. % % SOLUTION N = 8; K = 4; % Setting the design parameters for G(z) B = ([1,zeros(1,N-1),-1]/N); A = [1,-1]; % CIC filter section G(z) = A(z)/B(z) [G,f] = freqz(B,A,1024,2); % Computing the CIC filter frequency response GK = G.^K; % Computing the frequency response of G_K(z) = G(z)^K figure(1), plot(f,20*log10(abs(GK))), hold on, xlabel('\omega/\pi'),ylabel('Gain, dB'), axis([0,1,-100,2]); % FIR filter T(z) Nord=22; % Filter order for T(z) Fo = [0,0.25,0.505,1]; Ao = [0.985,1.09,0,0]; % Setting the specifications for T(z) t = firpm(Nord,Fo,Ao); % Computing the coefficients of T(z) [T,f]=freqz(t,1,1024,2); % Computing the frequency response of T(z) figure(2), plot(f,20*log10(abs(T))), grid, xlabel('\omega/\pi'),ylabel('Gain, dB'), title('Gain response of T(z)'), axis([0,1,-100,2]); figure(1), tN=upsample(t,N); % Computing the coefficients of T(z^N) [TN,f]=freqz(tN,1,1024,2); % Computing the frequency response of T(z^N) plot(f,20*log10(abs(TN)),'--',f,20*log10(abs(GK)),'b'), grid, title('Gain responses of G(z)^4) and T(z^8)'), axis([0,1,-100,2]); % Pole-zero plot of G_K(z) = G(z)^K figure(3), zplane(conv(conv(B,B),conv(B,B)),conv(conv(A,A),conv(A,A))), title('Pole-zero plot of G(z)^4'); figure(4), % Pole-zero plot of T(z) zplane(t,1), title('Pole-zero plot of T(z)'), % Computing the frequency response of the single-stage equivalent of the % two-stage factor-of-16 decimator: H = TN.*GK; % Computing the frequency response of (G(z)^K)*T(z^N) figure(5), plot(f,20*log10(abs(H))), grid, xlabel('\omega/\pi'),ylabel('Gain, dB'), title('Gain response of the two-stage factor-of-16 decimator'), axis([0,1,-100,2]); axes('Position',[0.35 0.71 0.45 0.1]); plot(f(1:54),20*log10(abs(H(1:54)))), axis([0,0.03,-0.2,0.2]),grid;
Exercise 11.4
Consider the polyphase implementation of a CIC filter.
Use equation (11.17a) and MATLAB program of Example 11.2 to compute
the coefficients of the FIR transfer function H1(z)
for the following parameters:
(i) N1 = 4, K = 4;
(ii) N1 = 8, K = 3.
close all, clear all % (i) N1 = 4, K = 4 N1 = 4; g = rectwin(N1); h1 = 1; K = 4; for l = 1:K h1 = conv(h1,g); end disp('Coefficients of the filter impulse tesponse') disp(['h_1: ' num2str(h1')]); % Display the coefficients of the filter impulse response h1 % Polyphase components: e0 = downsample(h1,4); e1 = downsample(h1,4,1); e2 = downsample(h1,4,2); e3 = downsample(h1,4,3); disp('Coefficients of the polyphase components') disp(['e_0: ' num2str(e0')]); disp(['e_1: ' num2str(e1')]); disp(['e_2: ' num2str(e2')]); disp(['e_3: ' num2str(e3')]); % Display the coefficients of polyphase components e0, e1, e2, e3 % (ii) N1 = 8, K = 3 N1 = 8; g = rectwin(N1); h1 = 1; K = 3; for l = 1:K h1 = conv(h1,g); end disp(' ') disp('Coefficients of the filter impulse tesponse') disp(['h_1: ' num2str(h1')]); % Display the coefficients of the filter impulse response h1 % Polyphase components: e0 = downsample(h1,N1); e1 = downsample(h1,N1,1); e2 = downsample(h1,N1,2); e3 = downsample(h1,N1,3); e4 = downsample(h1,N1,4); e5 = downsample(h1,N1,5); e6 = downsample(h1,N1,6); e7 = downsample(h1,N1,7); % Display the coefficients of polyphase components e0-e7 disp('Coefficients of the polyphase components') disp(['e_0: ' num2str(e0')]); disp(['e_1: ' num2str(e1')]); disp(['e_2= ' num2str(e2')]); disp(['e_3: ' num2str(e3')]); disp(['e_4: ' num2str(e4')]); disp(['e_5: ' num2str(e5')]); disp(['e_6: ' num2str(e6')]); disp(['e_7: ' num2str(e7')]);
Coefficients of the filter impulse tesponse h_1: 1 4 10 20 31 40 44 40 31 20 10 4 1 Coefficients of the polyphase components e_0: 1 31 31 1 e_1: 4 40 20 e_2: 10 44 10 e_3: 20 40 4 Coefficients of the filter impulse tesponse h_1: 1 3 6 10 15 21 28 36 42 46 48 48 46 42 36 28 21 15 10 6 3 1 Coefficients of the polyphase components e_0: 1 42 21 e_1: 3 46 15 e_2= 6 48 10 e_3: 10 48 6 e_4: 15 46 3 e_5: 21 42 1 e_6: 28 36 e_7: 36 28
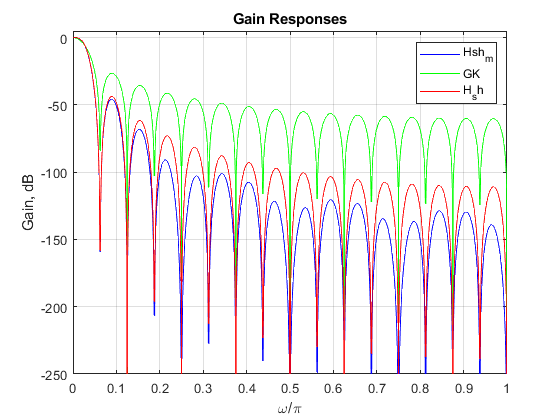
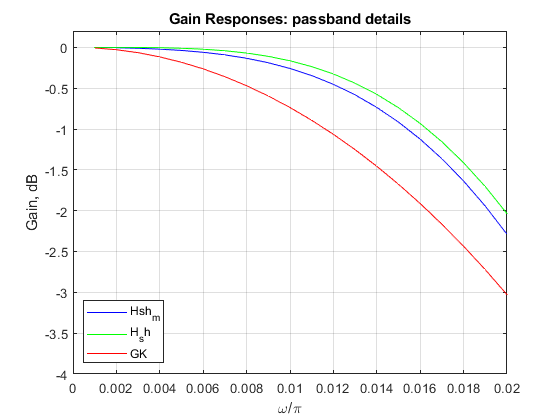
Exercise 11.5
Modify MATLAB program of Example 11.4 to compute
and plot the magnitude response for the following decimation filters:
a) Magnitude response of the modified sharpened CIC
filter determined by: N = 32, N1 = 4,
N2 = 8,
K = 2, and L = 4.
b) Magnitude response of the original CIC filter with
N = 32, and K = 2.
c) Magnitude response of the sharpened CIC filter
(equations (11.22) and (11.23)) with N = 32,
and K = 2.
clear all, close all % Modified sharpened FIR filter K = 2; N = 32; N1 = 4; N2 = 8; L = 4; % Setting the design parameters f = 0:0.001:1; % Setting the frequency axis omega = pi*f; % Angular frequencies H1 = (sin(omega*N/2)./sin(omega*N1/2))/N2; % Amplitude response of the CIC filter H1(z) H2 = (sin(omega*N1/2)./sin(omega/2))/N1; % Amplitude response of the CIC filter H2(z) H_sh_m = abs((3*H1.^(2*K) - 2*H1.^(3*K)).*(H2.^L)); % Magnitude response of the the modified sharpened filter figure(1), plot(f,20*log10(H_sh_m),'b'), axis([0,1,-250,5]), grid, hold on; G = (sin(omega*N/2)./sin(omega/2))/N; % Amplitude response of the original CIC filter GK = G.^K; % Computing the amplitude response of G(z).^K plot(f,20*log10(abs(GK)),'g'); H_sh = abs(3*G.^(2*K) - 2*G.^(3*K)); % Magnitude response of the original sharpened CIC filter plot(f,20*log10(H_sh),'r'), xlabel('\omega/\pi'), ylabel('Gain, dB'), legend('Hsh_m','GK','H_sh'), title('Gain Responses'); figure(2), plot(f(1:21),20*log10(H_sh_m(1:21)),'b'), hold on; plot(f(1:21),20*log10(H_sh(1:21)),'g'), xlabel('\omega/\pi'), ylabel('Gain, dB'), plot(f(1:21),20*log10(abs(GK(1:21))),'r'), axis([0,0.02,-4,0.2]), grid; legend('Hsh_m','H_sh','GK','Location','southwest'), title('Gain Responses: passband details');
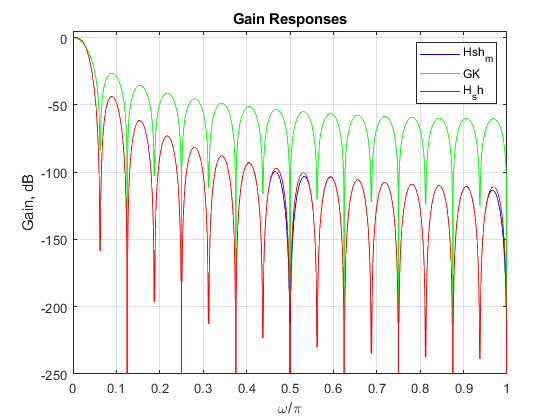
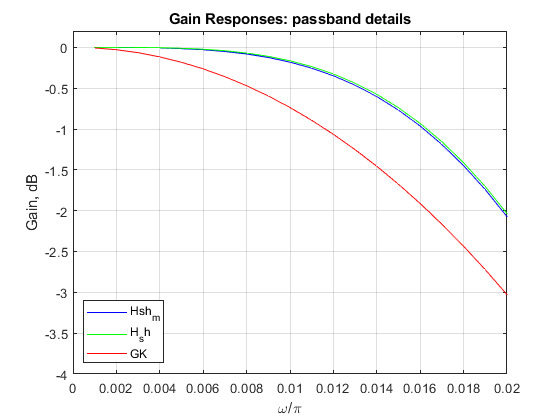
Exercise 11.6
Using the procedure of Exercise 11.5, compute and plot
the magnitude response for the following decimation filters:
a) Magnitude response of the modified sharpened CIC
filter determined by: N = 32, N1 = 4,
N2 = 8,
K = 2, and L = 5.
b) Magnitude response of the original CIC filter with
N = 32, and K = 2.
c) Magnitude response of the sharpened CIC filter
(equations (11.20) and (11.21)) with N = 32,
and K = 2.
clear all, close all % Modified sharpened FIR filter K = 2; N = 32; N1 = 8; N2 = 4; L = 5; % Setting the design parameters f = 0:0.001:1; % Setting the frequency axis omega = pi*f; % Angular frequencies H1 = (sin(omega*N/2)./sin(omega*N1/2))/N2; % Amplitude response of the CIC filter H1(z) H2 = (sin(omega*N1/2)./sin(omega/2))/N1; % Amplitude response of the CIC filter H2(z) H_sh_m = abs((3*H1.^(2*K)-2*H1.^(3*K)).*(H2.^L)); % Magnitude response of the modified sharpened filter figure(1), plot(f,20*log10(H_sh_m),'b'), axis([0,1,-250,5]), grid, hold on; G = (sin(omega*N/2)./sin(omega/2))/N; % Amplitude response of the original CIC filter GK = G.^K; % Computing the amplitude response of G(z).^K plot(f,20*log10(abs(GK)),'g') H_sh = abs(3*G.^(2*K) - 2*G.^(3*K)); % Magnitude response of the original sharpened CIC filter plot(f,20*log10(H_sh),'r'), xlabel('\omega/\pi'), ylabel('Gain, dB'), legend('Hsh_m','GK','H_sh'), title('Gain Responses'); figure(2), plot(f(1:21),20*log10(H_sh_m(1:21)),'b'), hold on; plot(f(1:21),20*log10(H_sh(1:21)),'g'), xlabel('\omega/\pi'), ylabel('Gain, dB'), plot(f(1:21),20*log10(abs(GK(1:21))),'r'), axis([0,0.02,-4,0.2]), grid, legend('Hsh_m','H_sh','GK','Location','southwest'), title('Gain Responses: passband details');
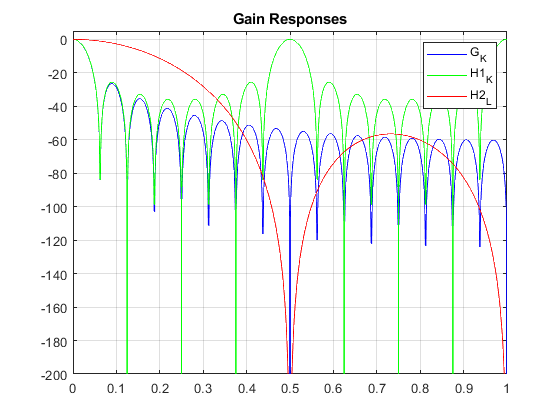
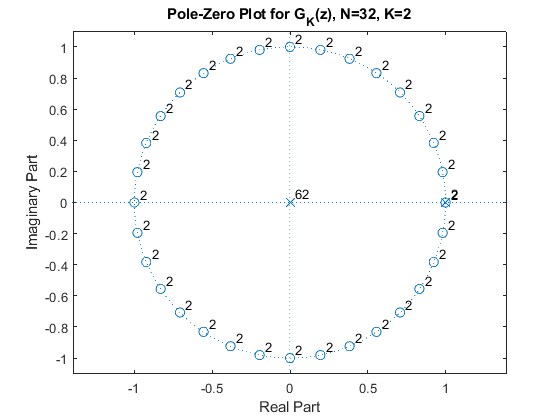
Exercise 11.7
Display the magnitude response and pole-zero plot
of the CIC filter GK(z) determined by
N = 32 and K = 2.
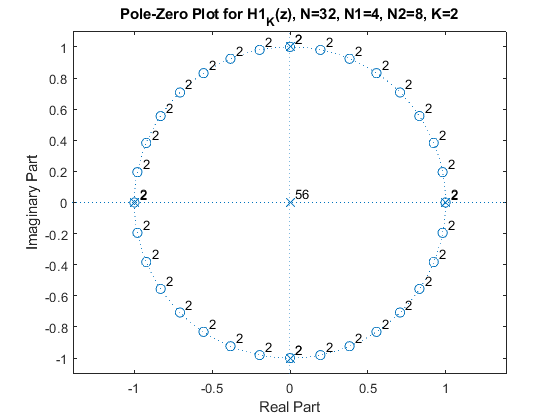
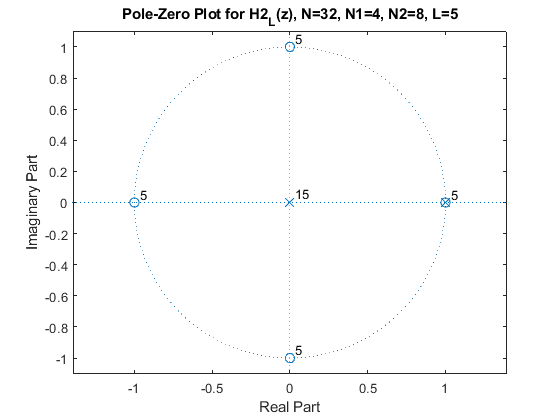
Compose the CIC subfilters [H1(zN1)]K
and [H2(z)]L of the modified sharpened filter as
given in equations (11.27) and (11.28).
Compute and plot the magnitude responses and pole-zero plots of
[H1(zN1)]K
and [H2(z)]L
for the parameters N = 32, N1 = 4, N2 = 8,
K = 2, and L = 5.
clear all, close all % Modified sharpened FIR filters K = 2; N = 32; N1 = 4; N2 = 8; L = 5; % Setting the design parameters f = 0:0.001:1; % Setting the frequency axis omega = pi*f; % Angular frequencies G = (sin(omega*N/2)./sin(omega/2))/N; % Amplitude response of the original CIC filter G_K = G.^K; % Computing the amplitude response of G(z).^K H1 = (sin(omega*N/2)./sin(omega*N1/2))/N2; % Amplitudee response of the CIC filter H1(z) H1_K = H1.^K; H2 = (sin(omega*N1/2)./sin(omega/2))/N1; % Amplitude response of the CIC filter H2(z) H2_L = H2.^L; figure(1), plot(f,20*log10(abs(G_K)),'b'), hold on, plot(f,20*log10(abs(H1_K)),'g') axis([0,1,-200,5]), grid, plot(f,20*log10(abs(H2_L)),'r'), legend('G_K','H1_K','H2_L'), title('Gain Responses'); % Computing the pole-zero plot for G_K(z), H1_K, and H2_L % Recursive representation of the CIC filter % G_K(Z)=(1/N)*(1-z^(-N))/(1-z^-1)=(1/N)*B(z)/A(z), K=2 B = [1,zeros(1,N-1),-1]; B2 = conv(B,B); A = [1,-1]; A2 = conv(A,A); figure(2), zplane(B2,A2), title('Pole-Zero Plot for G_K(z), N=32, K=2'); % Recursive representation of the filter H1_K, N=32, N1=4, N2=8, K=2 % H1_K(Z)=(1/N2)*(1-z^(-N))/(1-z^-N1)=(1/N2)*B(z)/A(z) B = [1,zeros(1,N-1),-1]; B2 = conv(B,B); A = [1,zeros(1,N1-1),-1]; A2 = conv(A,A); figure(3), zplane(B2,A2), title('Pole-Zero Plot for H1_K(z), N=32, N1=4, N2=8, K=2'); % Recursive representation of the filter H2_L, N=32, N1=4, N2=8, K=2 % H2_L(Z)=(1/N1)*(1-z^(-N1))/(1-z^-1)=(1/N1)*B(z)/A(z) B = [1,zeros(1,N1-1),-1]; BL = conv(B,B); BL=conv(BL,BL); BL=conv(BL,B); A = [1,-1]; AL = conv(A,A); AL=conv(AL,AL); AL=conv(AL,A); figure(4), zplane(BL,AL), title('Pole-Zero Plot for H2_L(z), N=32, N1=4, N2=8, L=5');